Difference between revisions of "Msc2workshop:workshop02"
(→CONTENT) |
|||
| Line 4: | Line 4: | ||
<br><br> | <br><br> | ||
| − | <span style="font-size: 20px; color: black;">'''Topological Assemblage: | + | <span style="font-size: 20px; color: black;">'''Topological Assemblage: D2RP-workshop'''</span> |
<br> | <br> | ||
'''Tutors team / assistant''': Henriette Bier, Sina Mostafavi and Ana Anton / Marco Galli | '''Tutors team / assistant''': Henriette Bier, Sina Mostafavi and Ana Anton / Marco Galli | ||
Revision as of 12:45, 2 May 2016
Topological Assemblage: D2RP-workshop
Tutors team / assistant: Henriette Bier, Sina Mostafavi and Ana Anton / Marco Galli
CONTENT
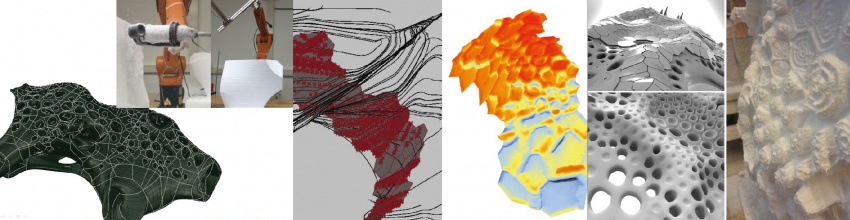
The workshop focuses on developing design-to-robotic-production (D2RP) methods for exploring assembly and componentiality in relation to requirements of porosity and variation at different scales, ranging from micro levels, as material systems, to macro levels as spatial and architectural configurations.
In this context, topological assemblage will be explored by designing and robotically producing a three-dimensional structure that consist of various components assembled into an integrated whole. The structure is part of the GSM podium/stage developed in the design studio and will be designed by taking into consideration requirements with respect to function/use, form, structure, and climate as follows:
(1) Functional requirements are addressed by mapping activities over a the 3 days period of the GSM symposium;
(2) Formal aspects are explored by taking into consideration material, structural, climatic requirements as well as principles of customisation, continuous variation, and componential re/combination;
(3) Climatic/environmental requirements are considered from a distributed passive-active control perspective.
Main consideration is that the structure is composed of components that are together establishing hybrid systems (programmatic, climatic, structural, etc.), which are in part or completely NC or robotically processed and operated. Porosity and variation are investigated in relation to performative aspects (related to functional, structural, and/or environmental needs).
ORGANIZATION
This workshop is framed around the design studio projects of groups 3 and 5. Members of other groups, who are interested in the D2RP workshop, will join group 3 and 5 based on their focus and interest.
SCHEDULE
Monday 2nd May
9:45-10:45, Introduction: Brief description
Design session
Structural and environmental material optimization
Tuesday 3rd May
Design session
Robot action introduction
Initial tests, (HWC) for exploring assembly and componentiality
Wednesday 4th May
Initial tests, (RM) for exploring porosity and variation
Design review session
Mid workshop assignment: (from Thursday to Sunday)
Two groups 3 and 5 collaborating and the expected outcome are two prototypes with designs informed in terms of assembly logic of material distribution and differentiation. Members of other groups, who are interested in the D2RP workshop, will join group 3 and 5 based on their focus and interest.
Monday 9th May
D2RP review session
Tool path generation and D2RP simulation
Design session: Development and refinement
Tuesday 10th May
Prototyping 1st Group 1
Wednesday 11th May
Prototyping 1st Group 1
Prototyping 2nd Group 2
Thursday 12th May
Prototyping 2nd Group 2
Friday 13th May
Preparation
Presentation